
Parametrinen, etäohjelmoitava 3D-malli Pemamek Oy:n robottihitsausohjelmistolle
Robottiautomaation hyödyntäminen teollisuudessa edellyttää lukuisia resursseja ja ymmärrystä sen mahdollisuuksista ja rajoituksista. Kuinka voidaan varmistua automaatioratkaisua suunnitellessa sen realistisista mahdollisuuksista ja kannattavuudesta? Kuinka automaatioratkaisuja tarjoava yritys kykenee demonstroimaan asiakkaalle heidän teknologiansa toiminnan ja tekemään räätälöidyn ratkaisun juuri tämän pyyntöjen mukaan? Teollisuusalalla pyritään hyödyntämään tietokoneavusteista suunnittelua ja valmistusta mahdollisimman paljon tuotannon parantamiseksi, mutta kun lukuisia ohjelmistoja käytetään suunnitteluun, simulointiin ja ohjelmointiin käy ilmi, kuinka haasteellista on tuoda jokainen automaatioteollisuuden osa-alue yhteen ja pitää alkuperäisestä suunnitelmasta kiinni. Tiedostojen yhteensopivuudet, mittayksiköt ja kielimuurit tulevat olemaan osa kansainvälisesti toimivan yrityksen haasteita ja moni yritys päätyykin kehittämään ratkaisun oman toimintansa optimoimiseksi, pyrkien samalla yhteistyöhön muiden ratkaisujen kehittäjien kanssa ja tarjoamalla yhteistyönsä tuloksia muille.
Pemamek Oy pyrkii tuomaan suunnittelun, simuloinnin, robottiohjelmoinnin ja asiakasdemonstraatiot yhteen WeldControl-ohjelmistolla. Graafisella käyttöliittymällä varustellulla ohjelmistolla voidaan 3D-malleilla visuaalisesti esitellä hitsausautomaatioon kehitettyjen laitteiden kokoluokkia, ominaisuuksia, varustelujavaihtoehtoja ja tekemään asiakkaan työkappaleille alustavia ja lopullisia hitsaussimulaatioita.
Mikä on WeldControl?
Pemamek Oy:n WeldControllista on olemassa useita ohjelmistoversioita, mutta tässä artikkelissa käsitellään versiota WeldControl 300, joka on Visual Components -simulointiohjelmiston pohjalta tehty, konepajateollisuuden hitsausautomaatioon erikoistuva etäohjelmointiohjelmisto. WeldControl 300:lla on mahdollista luoda ja testata hitsausohjelmia työkappaleille 3D-mallien avulla, keskeyttämättä työprosessia ja siirtämällä hitsausohjelma robotille vasta tämän ollessa täysin valmis. Ohjelmisto on optimoitu Pemamek Oy:n omille laitteille ja tehty mahdollisimman yksinkertaiseksi käyttää ja opettaa operaattoreille, jolloin käyttäjällä ei ole tarvetta Visual Components Premium-lisenssin ominaisuuksien laajalle opettelemiselle. Tämä kuitenkin tarkoittaa myös, että käyttäjällä ei ole pääsyä ohjelmiston piirteisiin, joilla voidaan muuttaa 3D-mallin geometrisia piirteitä tai rajoittaa robottiyksikön nivelien liikkeitä, jolloin samaa mallia ei tavallisesti voida käyttää uudelleen toisen robottiyksikön ohjelmoimiseen. Tämä ongelma on mahdollista ohittaa käyttämällä etäohjelmointimallin kehitysvaiheessa Visual Componentsin omia työkaluja, joilla voidaan luoda käyttäjäystävällisiä valikoita simulaation komponenteille. Henkilö, jolla on Premium-lisenssi Visual Components-ohjelmistolle, voi valmistella malliin piirteitä, joita voidaan realistisesti ajatella muokattavan tulevaisuudessa. Tällöin voidaan yhdellä mallilla antaa useille operaattoreille riittävän tason hallinta piirteistä ilman tarvetta opettaa heille monimutkaista ja aikaa vievää prosessia ohjelmistoversiolla, jota he muutoin tarvitsevat hyvin harvoin.
Parametrisuuden sovellutus etäohjelmointimalliin
Parametrisuus on kriittinen osa tietokoneavusteista suunnittelua. Parametrisella 3D-mallilla viitataan malliin, jolla on mahdollista suorittaa käyttäjäsyötöillä muutoksia mallin piirteisiin, jotka ovat kyseisistä syötöistä, eli parametreista riippuvaisia. Vietäessä mallia simuloitavaksi tulee parametrien kuitenkin olla tallennettu, jotta simulointiohjelmisto kykenee luomaan mallille oikeaoppiset kinematiikat, eli geometriset liikkeet. Simulaation realistinen toiminta edellyttää geometristen piirteiden pysymistä muuttumattomana simulaation aikana. Hyvä tapa estää käyttäjää tekemästä muutoksia, jotka voisivat saada aikaiseksi virheellisiä simulaatioita, on piilottaa työkalut, joilla näitä voidaan tehdä. Mutta mallin tekeminen jokaiselle eri robottiyksikölle on pitkä prosessi. Kun kahden eri mallin välillä on vain hyvin pieniä eroavaisuuksia, joiden muutokset olisi mahdollista suorittaa yksinkertaisilla parametrien muutoksilla on suositeltavampaa etsiä parempia ratkaisuja kuin joutua siirtymään ohjelmasta toiseen tehdäkseen muutoksia tai jopa palata takaisin alkupisteeseen mallin teossa.
Siksi WeldControl 300:n etuna toimii mahdollisuus päivittää kinematiikat ennen simulaatioiden ajoa. Mikäli mallissa on Visual Components-ohjelmistolla tehdyt valikot, joista parametreja muutetaan, on operaattorin mahdollista tehdä tarvittavat muutokset yksiköiden välillä näistä. Tämän jälkeen yksinkertaisesti päivitetään kinematiikat ennen simulaatiota, jolloin samaa etäohjelmointimallia voidaan käyttää kahden tai useamman, erikokoisen robottiyksikön ohjelmoimiseen.
Mallin kehitys
Parametrisen etäohjelmointimallin kehittäminen edellyttää tietoa kaikista piirteistä, joita saatetaan haluta muokata tulevaisuudessa. Jokainen mallin iteraatio tulee realistisesti olla mahdollista valmistaa, jolloin vakiomallin kehitysprosessi edellyttää tarkkaa suunnitteluja ja pitkäkatseisuutta yritykseltä, sekä yhteisymmärrystä ja tiukkaa yhteistyötä suunnittelijoiden, valmistajien ja ohjelmoijien välillä. Lopputulos on askel kohti virtaviivaisempaa tulevaisuutta yrityksen kehityksessä ja työhön käytetty aika sekä tämän aikana tehdyt havainnot auttavat ymmärtämään aikaisemmin tehtyjä virheitä suunnittelutyössä, puutteita toiminnassa ja tuotannossa, sekä tekemään kattavan yleiskatsauksen kannattavasta yritystoiminnasta taloudellisesti ja teknisesti. Kun vakiomallia käytetään mahdollisimman monessa projektissa voidaan säästetty aika käyttää muihin suunnittelu- ja simulointitöihin, sekä käyttää mallin kehityksessä kerättyä tietoa ohjelmistojen mahdollisuuksista tulevaisuuden projekteissa.
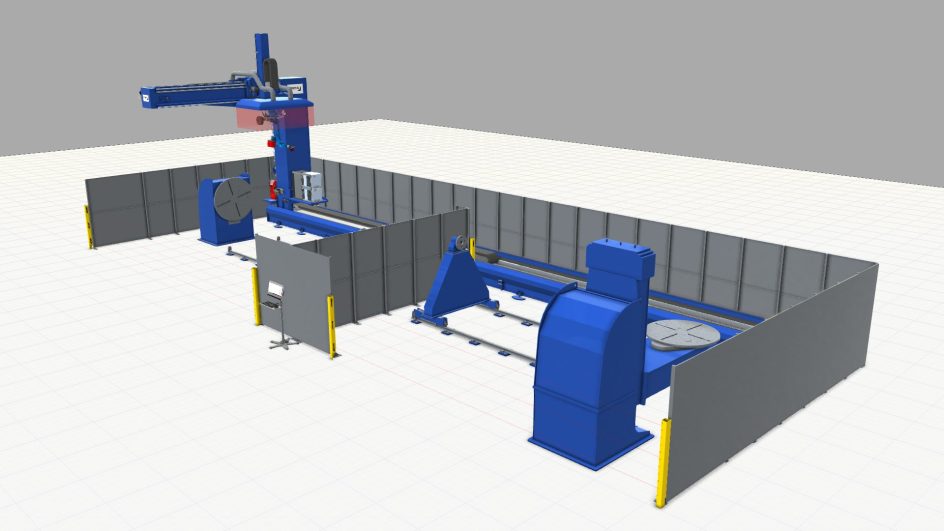
Uusin robottihitsausaseman parametrinen vakiomalli
Pemamek Oy on ottanut käyttöönsä robottihitsausaseman vakiomallin, jolla on mahdollista etäohjelmoinnin lisäksi luoda alustavia, turvastandardien mukaisia turva-aitauksia soluissa, joissa työkappaletta käsitellään yksi- tai kaksiakselisilla kääntöpöydillä. Yhteensopivilla kääntöpöytämalleilla, käyttäjäkomennoilla ja PythonScriptin lisätoiminnoilla kyseisen hitsausaseman alustavat minimialueet voidaan luoda minuuteissa aikaisempien tuntien tai päivien sijaan. Kun sopivat parametrit on valittu, voidaan samat parametrit asettaa kevyempään versioon mallista, jolla tullaan suorittamaan etäohjelmointi. Malli tulee toimimaan tulevaisuudessa pohjana kehitystyölle johtuen sen laajasta muokattavuudesta ja helppokäyttöisyydestä.
Mallin parametrisiin piirteisiin lukeutuu:
- Robottiportaalin liikkeet X-, Y- ja Z-suunnassa sekä robotin alkukorkeus.
- Hitsausvarustelun vaihto
- Vaihtoehto visuaalisesti kevyen ja raskaan mallin välillä
- Aitauksen dimensioiden ja piirteiden muokkaus (Valoverhot, operaattoripisteet ja vaihto yhden tai kahden solun välillä)
- Kiinnityspisteet yhteensopiville kääntöpöydille
- Robotin nivelien liikerajat
Lähde:
Taskinen, M. 2023. Parametrinen OLP-malli lattiaratahitsausrobotille : Pemamek Oy – Theseus, Turun ammattikorkeakoulun opinnäytetyö.