
Purkusolun automatisointi – 3D- konenäköjärjestelmän hyödyntäminen lajittelussa
Nordic Traction Oy siirsi alkukeväästä 2025 tuotantoa Skotlannin Dumfrieristä Loimaalle. Loimaalle siirretyssä telatuotantolinjassa on kaksi prässiä, joilla valmistetaan kahta erilaista telatyyppiä samanaikaisesti. Teollisuusrobottia oltiin käytetty aikaisempien linjastojen päässä, silloin kun prässit olivat vielä erillisissä linjastoissa mutta vain yhden telakengän siirtämiseen. Linjat yhdistettiin samaan tuotantolinjastoon muutama vuosi ennen tuotannon siirtoa, minkä vuoksi Skotlannin tehtaassa vaihduttiin manuaaliseen lajitteluun.
Robottia ei enää voitu käyttää variaation vuoksi, sillä se ei pystynyt tunnistamaan telakenkiä toisistaan. Nykyinen työkierto kohdistaa siinä työskenteleville työntekijöille turhaa fyysistä rasitusta, jossa he joutuvat nostamaan ja lajittelemaan 10-30 kiloa painavia telakenkiä kahdessa vuorossa. Tämän vuoksi Nordic Traction lähti tarkastelemaan vaihtoehtoista toteutustapaa työpisteen automatisoimiseksi.
Manuaalisen työpisteen automatisoinnin kompastuskivenä on yrityksen yli 100 kappaleen variaatiota telakengille. Jokainen telakenkä on muotoiltava ja sovittava yhtenään metsä- ja maatalouskoneiden rengasmuotojen kanssa. Räätälöinti on ollut yrityksen toiminnalle kannattavaa sen asiakaslähtöisyyden vuoksi, jonka kanssa ollaan varmistettu, että jokainen telasarja on toimintakyvyltään juuri sopiva kyseisen koneen käyttötarkoitukseen ja ympäristöön.
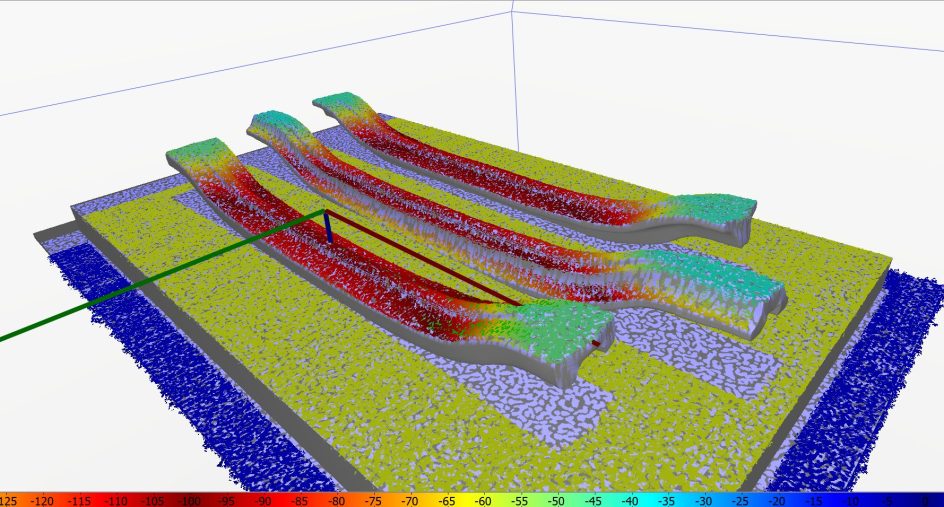
Variaatio aiheuttaa teollisuusrobotille kuitenkin vaikeuksia. Teollisuusrobotti on lähtökohdaltaan kankea ympäristöissä, joissa tapahtuu muutoksia kappaleiden vaihtelussa. Tässä tapauksessa 3D- konenäköjärjestelmä tuo lajitteluprosessiin robotin ohjaukseen tarvittavaa rakennetta, jossa voidaan hyödyntää 3D- kameran tuottamaa pistepilvidataa, eli kappaleen 3D- mallista muodostuvia pisteitä.
Yritykseen kehitettävään automatisointiprojektiin vaaditaan usein konseptiesitystä ennen lopullisen budjetin hyväksyntää. Konseptiesityksessä saavutetaan yrityksen projektille lisäarvoa, jota voidaan hyödyntää muun muassa:
- Koneiden sijoituksessa
- Turvallisuussuunnitelman laatimisessa
- Validoinnissa
- Virheiden välttämisessä
- Asennuksessa
- Kustannusarviossa
Kustannus-/hankintaluettelosta yrityksen taloushallinto saa osakseen selkeämpää kuvaa projektin kustannusrakenteesta.
TUKES: ”Turva-automaatiojärjestelmän elinkaari sisältää turva-automaation toteutukseen liittyvät toimenpiteet, jotka tapahtuvat ajanjaksona, joka alkaa projektin konseptivaiheesta ja päättyy, kun mikään turvatoiminnoista ei ole enää käytettävissä.”
Työn konseptisuunnittelu alkoi tilanteesta, jossa vain tila, vaadittu suorituskyky ja teollisuusrobotti oli määritetty. Alkukartoituksessa toteutunut ympäristön 3D- mallinnus 1:1 suhteella edesauttoi pohjapiirustuksen toteuttamista, kun suuren 1300kg teollisuusrobotin paikka voitiin määrittää, ottaen huomioon sen liikealue ja rajoitukset. Turvallisuutta ei konseptitoteutuksessa voida unohtaa, vaan se on olennainen osa layout- suunnittelua. Turvallisuus on erittäin tärkeä osa työntekijöiden ja robottien kanssakäymistä, joka määrittää myös sen, miten mielekästä robotin kanssa on työskennellä.
3D- konenäkö osana simulointiympäristöä
3D- konenäköjärjestelmät ovat maailmalla yleistymässä. 3D-konenäkömarkkinan koko on vuonna 2024 arviolta 3,92 miljardia dollaria ja sen odotetaan kasvavan 8,44 miljardiin dollariin vuoteen 2032 mennessä. Markkinan vuotuinen kasvuvauhti on noin 10,1 %. Tämän kasvun taustalla vaikuttavat muun muassa teollisuuden automaation lisääntyminen, tekoälypohjaisen kuvatunnistuksen kehittyminen sekä laadunvalvonnan, ohjauksen ja mittauksen tehostamistarpeet (Fortune Business Insights 2025). Viimeisimpänä käyttökohteina ovat autonomiset järjestelmät, kuten ruoantoimitusrobotit ja ihmisenkaltaiset humanoidirobotit.
Simulointiohjelmistot, kuten ABB:n RobotStudio ja RoboDK pystyvät simuloimaan todenmukaisesti sekä robotin toimintaympäristöä että liikkeitä. Simulointi tuo osakseen 3D- datan hyödyntämisen suunnitteluun mallintamalla sen toimintaympäristön virtuaalimaailmaan. Virtuaalimaailmaa hyödynnetään niin digitaalisissa kaksosissa tuotannon seuraamisessa kuin myös konseptitoteutuksissa. 3D- konenäköohjelmiston liittämisen tähän simulointiympäristöön tuo uuden ulottuvuuden konseptitoteutukseen. Useat konenäköyritykset ovat laajentaneet tuoteportfoliotaan lanseeraamalla konenäköohjelmistoistaan niin sanotut SDK:t eli ohjelmistokehityspaketin. Ohjelmilla yritykset, tai niissä työskentelevät konseptitoteuttajat voivat nopeuttaa projektin aikataulua kun he pääsevät tutustumaan ja kehittämään ohjelmointiaan, jo ennen varsinaisen kameran asentamista. Yhteyden muodostamisen ja ohjelmiston jouheva käyttö tarvitsee kuitenkin ohjelmointikielten kuten Python, C tai C++ käyttöä, joista kehitetyt sovellukset toimivat ohjelmointirajapintojen kautta, hakien tarvittavan datan järjestelmän kirjastoista.
Konenäköjärjestelmän suorituskyky vastaa robotin suoritusvaatimukseen poimia ja lajitella kappaleet niille kuuluville lavoille. Konenäköjärjestelmien soveltuvuus ei kuitenkaan rajoitu robotin ohjaukseen. Järjestelmä antaa tuotantosolulle mahdollisuuksia joustaville muutostöille. Kun uusi tuote siirtyy tuotantoon, tuotantosolussa ei tarvitse muokata kiinteitä rakenteita, vaan muutostyö tehdään muutamassa tunnissa opettamalla ohjelmistolle uusi kappale. Tämän lisäksi 3D- konenäköjärjestelmä antaa yrityksille mahdollisuuden seurata tuotteen laatua jokaisessa tuotantosolussa, joissa järjestelmää käytetään. Autonomisten järjestelmien yleistyessä, 3D- konenäköjärjestelmät tulevat olemaan edellytyksiä luotettavalle ja kustannustehokkaalle ohjaukselle käsikädessä tekoälyn kanssa.
Opinnäytetyö on läpileikkaus robottisolun suunnitteluvaiheista
Opinnäytetyö jakautui alkukartoitukseen, layout- suunnitteluun, joka sisälsi mallinnuksen, työkalutarttujan valinnan ja sen lieveilmiöiden selvityksen sekä turvallisuusselvityksen, katselmuksen 3D- konenäköön ja sen integrointia simulaatioon sekä viimeiseksi ohjelmointiin ja käyttöliittymään. Opinnäytetyö tuo esiin robottisolun suunnitteluun tarvittavaa poikkitieteellistä osaamista, jossa tarvitsee ymmärrystä mekaniikasta ohjelmointiin.
Onnistuneen konseptitoteutuksen myötä projekti on etenemässä toteutukseen, jossa raskas fyysinen työ poistetaan.
Artikkelin aiheena oleva opinnäytetyö julkaistaan Theseuksessa marraskuussa 2025. Työn tekijä on Aapo Teräs ja ohjaajana toimi Jyri Tulonen.
Lähteet:
Fortune Business Insights. 6.10.2025. 3D Machine Vision Market Size. Share Growth Report. Viitattu 27.10.2025. https://www.fortunebusinessinsights.com/3d-machine-vision-market-106080
TUKES Turvallisuus- ja kemikaalivirasto. 22.12.2021. Turva-automaatio prosessiteollisuudessa. Viitattu: 27.10.2025. https://tukes.fi/turva-automaatio-prosessiteollisuudessa